
由于每次更新格林函数都是在原有格林函数的基础上进行累积更新,并且需要在不同虚时上进行传递,数值误差的积累会越来越大。格林函数的计算涉及到的是矩阵运算,其数值误差增长的快慢与 $B$ 矩阵的范数有关。一个矩阵的范数指的是最大奇异值和最小奇异值的比值,对于无相互作用系统, $B$ 矩阵的范数就是 $\exp(\beta W )$ ,其中 $W$ 为能带最高与最低能量之差,即带宽。而对于相互作用体系,一般来说, $\beta$ 越大,相互作用强度越大, $B$ 矩阵的范数就越大,这点我们在数值计算中已经验证过。
在大 $U$ 或是 $\beta$ 很大的时候,计算格林函数就会有很大的数值稳定的问题,其原因在于...各矩阵的范数/condition number过大,在矩阵相乘的时候,大的和小的scale混在一起。我们有很多已经被证明是weakly backward stable的算法
对于格林函数的求解,等价为解线性方程组:
\left(I_{n}+B_{L} \cdots B_{2} B_{1}\right) x=b
\end{equation}\]
我们定义condition number为矩阵和矩阵的逆的范数的乘积:
\kappa\left(I_{n}+B_{L} \cdots B_{2} B_{1}\right) \equiv\left\|I_{n}+B_{L} \cdots B_{2} B_{1}\right\| \|\left(I_{n}+B_{L} \cdots B_{2} B_{1}\right)^{-1}
\end{equation}\]
该量大概的和矩阵最大奇异值与最小奇异值的比值有关,与矩阵乘法误差的上界有关。
因为condition number过大,所以我们得到的解的相对误差:
\frac{\|\tilde{x}-x\|}{\|x\|}=\mathcal{O}\left(\epsilon_{\mathrm{m}} \kappa\left(I_{n}+B_{L} \cdots B_{2} B_{1}\right)\right)
\end{equation}\]
会非常大。其中 $\epsilon_{\mathrm{m}}$ 是机器的unit round off 误差,IEEE单精度是 $\epsilon_{\mathrm{m}}=2^{-24}$,IEEE双精度是 $2^{-53}$ 。某些情况下 $\epsilon_{\mathrm{m}} \kappa\left(I_{n}+B_{L} \cdots B_{2} B_{1}\right)$ 很容易就比1还大,这意味着你的解可能一位有效的都没有。
数值稳定的具体操作如下。
先回忆一下定义:
其中 $\pm$ 对应自旋上下, $\cosh (\alpha)=e^{\Delta \tau U / 2}$ , $\operatorname{Diag}\left(\vec{S}_{l}\right)$ 表示对角元分别为 $s_{i, l}=\pm 1$ 的矩阵, $T$ 为只在
最近邻处有矩阵元 $-t$ 的矩阵。
为了避免数值稳定的问题,我们不妨每隔 $\tau_1$ 做一次数值稳定,$\tau_1$ 的选取使得 $B_{C}\left(n \tau_{1},(n-1) \tau_{1}\right)$ 不超过机器精度。而 $B_{C}(\tau, 0)=B_{C}\left(n \tau_{1},(n-1) \tau_{1}\right) \cdots B_{C}\left(\tau_{1}, 0\right)$ ,我们做数值稳定的第一步是得到 $B_{C}(\tau, 0)$ 或 $B_{C}(\beta,\tau)$ 的对应的UDV矩阵(注意,不是直接对这些矩阵进行奇异值分解),以 $n=3$ 为例子:
B_{C}\left(2 \tau_{1}, \tau_{1}\right) \underbrace{B_{C}\left(\tau_{1}, 0\right)}_{U_{1} D_{1} V_{1}}=\underbrace{\left(\left(B_{C}\left(2 \tau_{1}, \tau_{1}\right) U_{1}\right) D_{1}\right)}_{U_{2} D_{2} V} V_{1}=U_{2} D_{2} V_{2}
\end{equation}\]
B_{C}\left(3 \tau_{1}, 2\tau_{1}\right) \underbrace{ B_{C}\left(2 \tau_{1}, 0\right) }_{U_{2} D_{2} V_{2}}=\underbrace{\left(\left(B_{C}\left(3 \tau_{1}, 2\tau_{1}\right) U_{2}\right) D_{2}\right)}_{U_{3} D_{3} V^{\prime}} V_{2}=U_{3} D_{3} V_{3}
\end{equation}\]
通过如此的方法,我们能得到 $B_{C}(\tau, 0)=U_{R} D_{R} V_{R}$ ,类似的,对于 $B_{C}(\beta, \tau)$ ,同样的有 $B_{C}(\beta, \tau)=V_{L} D_{L} U_{L}$ (注意之前是UDV,现在是VDU,之前是从右往左逐步做奇异值分解得到,现在是从左往右)。
实际上经常选择做 modified Gram-Schmidt (MGS)。其中 $U$ 是正交的, $D$ 是对角的, $V$ 是单位上三角阵。总之,我们的目的是,希望 $U$ 和 $V$ 的性质都很好(这样的矩阵,矩阵乘法的性质很好),只有 $D$ 矩阵的condition number很大。或者QR分解/LQ分解。
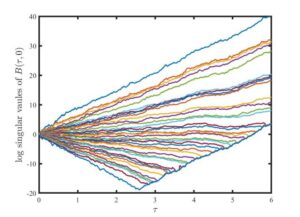
事实上,如果不进行逐步的SVD,或者是使用某些算法实现的SVD,可以看到数值不稳定的迹象之一: $B(\tau,0)$ 所得到的包含奇异值的各个$D$矩阵,即所对应的奇异值,在$\tau$很大的时候,会有奇异的现象如图(arXiv:2003.05286 ),即较小的奇异值会上升且数值变的相同(如图为 $U=6, L=6, \Delta \tau=0.01$ ,使用matlab自带的svd函数进行数值稳定的结果):
在此基础上,有诸多方法计算格林函数:
方法一
已知:
\left(\begin{array}{cc}
A & B \\
C & D
\end{array}\right)^{-1}=\left(\begin{array}{cc}
\left(A-B D^{-1} C\right)^{-1} &\left(C-D B^{-1} A\right)^{-1} \\
\left(B-A C^{-1} D\right)^{-1} &\left(D-C A^{-1} B\right)^{-1}
\end{array}\right)
\end{equation}\]
且有:
\begin{array}{c}
\left(\begin{array}{cc}
I & B_{C}(\beta, \tau) \\
-B_{C}(\tau, 0) & I
\end{array}\right)^{-1}=
\left(\begin{array}{cc}
G_{C}(0,0) & G_{C}(0,\tau) \\
G_{C}(\tau,0) & G_{C}(\tau,\tau)
\end{array}\right)
\end{array}
\end{equation}\]
则:
\begin{aligned}
&\left(\begin{array}{cc}
I & V_{L} D_{L} U_{L} \\
-U_{R} D_{R} V_{R} & I
\end{array}\right)^{-1}=\\
&\left[\left(\begin{array}{cc}
V_{L} & 0 \\
0 & U_{R}
\end{array}\right) \underbrace{\left(\begin{array}{cc}
\left(V_{R} V_{L}\right)^{-1} & D_{L} \\
-D_{R} & \left(U_{L} U_{R}\right)^{-1}
\end{array}\right)}_{U D V}\left(\begin{array}{cc}
V_{R} & 0 \\
0 & U_{L}
\end{array}\right)\right]^{-1}=\\
&\left[\left(\begin{array}{cc}
\left(V_{R}\right)^{-1} & 0 \\
0 & \left(U_{L}\right)^{-1}
\end{array}\right) V^{-1}\right] D^{-1}\left[U^{-1}\left(\begin{array}{cc}
\left(V_{L}\right)^{-1} & 0 \\
0 & \left(U_{R}\right)^{-1}
\end{array}\right)\right]
\end{aligned}
\end{equation}\]
得到的矩阵的右下角即为 $G(\tau,\tau)$
方法二
\begin{aligned}
G(\tau,\tau)=&\left(1+B_{C}(\tau, 0) B_{C}(\beta, \tau)\right)^{-1}\\
=&\left(1+U_{R} D_{R} V_{R} V_{L} D_{L} U_{L}\right)^{-1} \\
=&\left(U_{L}\right)^{-1} \underbrace{\left(\left(U_{L} U_{R}\right)^{-1}+D_{R}\left(V_{R} V_{L}\right) D_{L}\right.}_{U D V})^{-1} U_{R}^{-1}\\
=&\left(V U_{L}\right)^{-1} D^{-1}\left(U_{R} U^{-1}\right)
\end{aligned}
\end{equation}\]
方法三
此方法为我们实际上用的方法(分为用QR分解的和SVD分解(或modified Gram-Schmidt (MGS) factorization)的等等):
SVD(或modified Gram-Schmidt (MGS)factorization)
\begin{aligned}
G(\tau, \tau) &=[1+B(\tau, 0) B(\beta, \tau)]^{-1} \\
&=\left[1+U_{R} D_{R} V_{R} V_{L} D_{L} U_{L}\right]^{-1} \\
&=U_{L}^{-1}\left[\left(U_{L} U_{R}\right)^{-1}+D_{R}\left(V_{R} V_{L}\right) D_{L}\right]^{-1} U_{R}^{-1} \\
&=U_{L}^{-1}\left[\left(U_{L} U_{R}\right)^{-1}+D_{R}^{\max } D_{R}^{\min }\left(V_{R} V_{L}\right) D_{L}^{\min } D_{L}^{\max }\right]^{-1} U_{R}^{-1} \\
&=U_{L}^{-1}\left(D_{L}^{\max }\right)^{-1}\left[\left(D_{R}^{\max }\right)^{-1}\left(U_{L} U_{R}\right)^{-1}\left(D_{L}^{\max }\right)^{-1}+D_{R}^{\min } V_{R} V_{L} D_{L}^{\min }\right]^{-1}\left(D_{R}^{\max }\right)^{-1} U_{R}^{-1}
\end{aligned}
\end{equation}\]
第三个等号White等人当年也这么建议。
上式其中: $D_{L}^{\max }(i,i)= \max \left\{ D_{L}(i,i),1 \right\}$,$D_{L}^{\min }(i,i)= \min \left\{ D_{L}(i,i),1 \right\}$
类似的,有:
\begin{aligned}
G(\tau, 0) &=G(\tau, \tau) B(\tau, 0) \\
&=[1+B(\tau, 0) B(\beta, \tau)]^{-1} B(\tau, 0) \\
&=\left[1+U_{R} D_{R} V_{R} V_{L} D_{L} U_{L}\right]^{-1} U_{R} D_{R} V_{R} \\
&=U_{L}^{-1}\left[D_{R}^{-1} U_{R}^{-1} U_{L}^{-1}+V_{R} V_{L} D_{L}\right]^{-1} V_{R} \\
&=U_{L}^{-1}\left[\left(D_{R}^{\max } D_{R}^{\min }\right)^{-1} U_{R}^{-1} U_{L}^{-1}+V_{R} V_{L}\left(D_{L}^{\min } D_{R}^{\max }\right)\right]^{-1} V_{R} \\
&=U_{L}^{-1}\left(D_{L}^{\max }\right)^{-1}\left[\left(D_{R}^{\max }\right)^{-1}\left(U_{L} U_{R}\right)^{-1}\left(D_{L}^{\max }\right)^{-1}+D_{R}^{\min } V_{R} V_{L} D_{L}^{\min }\right]^{-1} D_{R}^{\min } V_{R}
\end{aligned}
\end{equation}\]
以及:
\begin{aligned}
G(0,0) &=[1+B(\beta, 0)]^{-1} \\
&=[1+B(\beta, \tau) B(\tau, 0)]^{-1} \\
&=\left[1+V_{L} D_{L} U_{L} U_{R} D_{R} V_{R}\right]^{-1} \\
&=V_{R}^{-1}\left[\left(V_{R} V_{L}\right)^{-1}+D_{L}\left(U_{L} U_{R}\right) D_{R}\right]^{-1} V_{L}^{-1} \\
&=V_{R}^{-1}\left[\left(V_{R} V_{L}\right)^{-1}+D_{L}^{\max } D_{L}^{\min }\left(U_{L} U_{R}\right) D_{R}^{\min } D_{R}^{\max }\right]^{-1} V_{L}^{-1} \\
&=V_{R}^{-1}\left(D_{R}^{\max }\right)^{-1}\left[\left(D_{L}^{\max }\right)^{-1}\left(V_{R} V_{L}\right)^{-1}\left(D_{R}^{\max }\right)^{-1}+D_{L}^{\min }\left(U_{L} U_{R}\right) D_{R}^{\min }\right]^{-1}\left(D_{L}^{\max }\right)^{-1} V_{L}^{-1}
\end{aligned}
\end{equation}\]
还有:
\begin{aligned}
G(0, \tau) &=-B^{-1}(\tau, 0)(1-G(\tau, \tau)) \\
&=-B^{-1}(\tau, 0) B(\tau, 0)[1+B(\beta, 0)]^{-1} B(\beta, \tau) \\
&=-[1+B(\beta, 0)]^{-1} B(\beta, \tau) \\
&=-\left[1+V_{L} D_{L} U_{L} U_{R} D_{R} V_{R}\right]^{-1} V_{L} D_{L} U_{L} \\
&=-V_{R}^{-1}\left[D_{L}^{-1} V_{L}^{-1} V_{R}^{-1}+U_{L} U_{R} D_{R}\right]^{-1} U_{L} \\
&=-V_{R}^{-1}\left(D_{R}^{\max }\right)^{-1}\left[\left(D_{L}^{\max }\right)^{-1}\left(V_{R} V_{L}\right)^{-1}\left(D_{R}^{\max }\right)^{-1}+D_{L}^{\min }\left(U_{L} U_{R}\right) D_{R}^{\min }\right]^{-1} D_{L}^{\min } U_{L}
\end{aligned}
\end{equation}\]
QR
\begin{aligned}
G(\tau, \tau) &=[1+B(\tau, 0) B(\beta, \tau)]^{-1} \\
&=\left[1+Q_{R} D_{R} T_{R} T_{L} D_{L} Q_{L}\right]^{-1} \\
&=Q_{L}^{-1}\left[\left(Q_{L} Q_{R}\right)^{-1}+D_{R} T_{R} T_{L} D_{L}\right]^{-1} Q_{R}^{-1} \\
&=Q_{L}^{-1}\left[\left(Q_{L} Q_{R}\right)^{-1}+D_{R}^{\max } D_{R}^{\min } T_{R} T_{L} D_{L}^{\min } D_{L}^{\max }\right]^{-1} Q_{R}^{-1} \\
&=Q_{L}^{-1}\left(D_{L}^{\max }\right)^{-1}\left[\left(D_{R}^{\max }\right)^{-1}\left(Q_{L} Q_{R}\right)^{-1}\left(D_{L}^{\max }\right)^{-1}+D_{R}^{\min } T_{R} T_{L} D_{L}^{\min }\right]^{-1}\left(D_{R}^{\max }\right)^{-1} Q_{R}^{-1}
\end{aligned}
\end{equation}\]
其余情况不再举例。
总之总之,我们希望做的事情就是尽可能的将大的scale和小的scale分离,仅仅在最后才将他们mix在一起。
大致流程
在代码中,我们实际只需要一套UDV的变量存在,在更新到第 $\tau$ 层时,我们分别有一半的 $ U_{R} D_{R} V_{R}$ 和一半的 $V_{L} D_{L} U_{L}$ 。注意到等时格林函数需要的是两边的 $B(\tau, 0) $ 和 $B(\beta, \tau)$ 的UDV矩阵。
比如最初先得到所有的 $B(\tau, 0) $ 对应的UDV矩阵。然后从第 $\beta$ 层逐层更新辅助场,则只需要逐步的得到到第 $\tau$ 层为止的 $B(\beta, \tau)$ 所对应的VDU矩阵即可。
符号问题
我们知道,在进行量子系统的模拟时,我们实际上将其转化为了经典的概率分布,来进行蒙卡的采样。而实际上对于行列式蒙卡来说,各个辅助场构型所对应的权重为某个矩阵的行列式,如果没有任何限制,一个行列式的值自然可能是负数甚至是复数,如果对应的权重不是正的实数,如此我们就无法进行马尔科夫蒙特卡洛的计算(因为权重比和我们的接受概率有关,一个负的或复的接受概率,我们无法继续进行计算)。
值得注意的是,符号问题的产生decouple的方式有关,同样的也和计算是basis的选取有关(显然如果选取能量的本征态,就没有符号问题)。符号问题是一个NP-hard的问题,即不存在符号问题的通用的一般解决方案。
下面简单介绍两类,对于部分情况下,没有符号问题的证明:
情况一
如果一个系统有着反幺正对称性存在,则系统没有符号问题。
反幺正变换的性质见附录
具体的表述为,如果存在一个反幺正变换$\mathcal{K}$,使得:
\begin{aligned}
\mathcal{K} T \mathcal{K}^{\dagger} &=T \\
\mathcal{K} V(\mathcal{C}) \mathcal{K}^{\dagger} &=V(\mathcal{C}) \\
\mathcal{K}^{2} &=-1
\end{aligned}
\end{equation}\]
则费米子部分的权重相关的矩阵 $1+B_{C}(\beta, 0)$ 的本征值成对出现(即有本征值 $\lambda_i$ ,则相应的有对应的另一个本征值,其共轭 $\lambda_i^{*}$ ),即 $\det \left( 1+B_{C}(\beta, 0) \right) =\prod_i |\lambda_i|^2$ 。
上式其中 $T$ 和 $V(\boldsymbol{s})$ 分别为动能项和decouple之后的相互作用项。
对于权重对应矩阵 $1+B_{C}(\beta, 0)$ ,假设有本征值 $\lambda$ ,对应本征向量为 $\mathcal{V}$ ,我们有:
\left(1+B_{C}(\beta, 0)\right) \mathcal{V}=\lambda \mathcal{V}
\end{equation}\]
因为有 $\mathcal{K}(1+B(\beta, 0)) \mathcal{K}^{\dagger}=(1+B(\beta, 0))$ ,则:
(1+B(\beta, 0)) \mathcal{K} \mathcal{V}=\mathcal{K}(1+B(\beta, 0)) \mathcal{K}^{\dagger} \mathcal{K} \mathcal{V}=\lambda^{*} \mathcal{K} \mathcal{V}
\end{equation}\]
显然 $\lambda^{*}$ 也为其本征值。由反幺正变换的性质,我们有:
(\mathcal{V}, \mathcal{K} \mathcal{V})=\langle\mathcal{V}|\mathcal{K}| \mathcal{V}\rangle=\left\langle\mathcal{V}\left|\mathcal{K}^{\dagger} \mathcal{K} \mathcal{K}\right| \mathcal{V}\right\rangle^{*}=-\left\langle\mathcal{V}\left|\mathcal{K}^{\dagger}\right| \mathcal{V}\right\rangle^{*}=-(\mathcal{K} \mathcal{V}, \mathcal{V})^{*}=-(\mathcal{V}, \mathcal{K} \mathcal{V})
\end{equation}\]
我们知道 $\mathcal{V}$ 和 $\mathcal{K} \mathcal{V}$ 是正交的,即 $\lambda$和$\lambda^{*}$ 是不同本征向量所对应的本征值。
而对于如下的哈密顿量:
\left\{\begin{aligned}
H_{\text {fermion }} &=-t \sum_{\langle i j\rangle \sigma \lambda} \hat{c}_{i \lambda \sigma}^{\dagger} \hat{c}_{j \lambda \sigma}+\text {h.c.}-\mu \sum_{i \sigma \lambda} \hat{n}_{i \lambda \sigma} \\
H_{\text {spin}} &=-J \sum_{\langle i j\rangle} \hat{s}_{i}^{z} \hat{s}_{j}^{z}-h_{x} \sum_{i} \hat{s}_{i}^{x} \\
H_{f-s} &=-\xi \sum_{i} s_{i}^{z}\left(\hat{c}_{i}^{\dagger} \tau_{z} \sigma_{z} \hat{c}_{i}\right)=-\xi \sum_{i} s_{i}^{z}\left(\hat{\sigma}_{i 1}^{z}-\hat{\sigma}_{i 2}^{z}\right)
\end{aligned}\right.
\end{equation}\]
我们注意到上的部分在反幺正变换下,变成下的部分:
\begin{aligned}
\hat{h}_{\uparrow} \quad=& \Delta \tau \cdot t \sum_{\langle i j\rangle \lambda} \hat{c}_{i \lambda \uparrow}^{\dagger} \hat{c}_{j \lambda \uparrow}+h . c .+\Delta \tau \cdot \mu \sum_{i \lambda} \hat{n}_{i \lambda \uparrow}+\Delta \tau \cdot \xi \sum_{i} s_{i}^{z}\left(\hat{n}_{i 1 \uparrow}-\hat{n}_{i 2 \uparrow}\right) / 2 \\
\stackrel{\mathcal{T}}{\longrightarrow} & \Delta \tau \cdot t \sum_{\langle i j\rangle \lambda} \hat{c}_{i \lambda \downarrow}^{\dagger} \hat{c}_{j \lambda \downarrow}+\text { h.c. }+\Delta \tau \cdot \mu \sum_{i \lambda} \hat{n}_{i \lambda \downarrow}+\Delta \tau \cdot \xi \sum_{i} s_{i}^{z}\left(\hat{n}_{i 1 \downarrow}-\hat{n}_{i 2 \downarrow}\right) / 2 \\
\stackrel{\tau_{x} \text { on orbital space }}{\longrightarrow} & \Delta \tau \cdot t \sum_{\langle i j\rangle \lambda} \hat{c}_{i \lambda \downarrow}^{\dagger} \hat{c}_{j \lambda \downarrow}+\text { h.c. }+\Delta \tau \cdot \mu \sum_{i \lambda} \hat{n}_{i \lambda \downarrow}+\Delta \tau \cdot \xi \sum_{i} s_{i}^{z}\left(\hat{n}_{i 2 \downarrow}-\hat{n}_{i 1 \downarrow}\right) / 2 \\
& \hat{h}_{\downarrow}
\end{aligned}
\end{equation}\]
则下的部分的权重与上的部分互相共轭,实际只需要算上部分的权重(比),不需要再计算下部分的权重(比)。
情况二
而对于诸如Hubbard model,情况略有不同。比如我们只能算$U>0$的半满的情况,是因为我们有着诸如下面的幺正的Particle-hole变换(仅在bipartite lattice是well-defined的)保证的:
\left\{\begin{array}{l}
c_{i \downarrow}^{\dagger} \rightarrow(-1)^{i} c_{i \downarrow} \\
c_{i \downarrow} \rightarrow(-1)^{i} c_{i \downarrow}^{\dagger}
\end{array}\right.
\end{equation}\]
hopping项不变,而对于decouple到不同channel的部分:
\text {$S_z$ Channel $\alpha$ 是实的} \rightarrow\left\{\begin{array}{c}
\alpha\left(n_{i \uparrow}-n_{i \downarrow}\right)\stackrel{P H \text { for spin-down }}{\longrightarrow} \alpha s_{i}\left(n_{i \uparrow}+n_{i \downarrow}-1\right) \\
e^{\alpha s_{i}\left(n_{i \uparrow}-n_{i \downarrow}\right)} \stackrel{P H \text { for spin-down }}{\longrightarrow} e^{\alpha s_{i}\left(n_{i \uparrow}+n_{i \downarrow}-1\right)}
\end{array}\right.
\end{equation}\]
$S_z$ Channel $\alpha$ 是实的,单看变换前的结果,是看不出是否有负符号问题存在的。而在Particle-hole变换之后,我们看到对于自旋上和下是相同的,最终权重应该是上的部分的平方,在乘上一个实的$\exp$型的因子,所以自然没有负符号问题(所有矩阵元素都是实的就更不会有复符号问题了)。
\text {CDW Channel $\alpha$ 是虚的} \rightarrow\left\{\begin{array}{c}
\alpha\left(n_{i \uparrow}+n_{i \downarrow}-1\right)\stackrel{P H \text { for spin-down }}{\longrightarrow} \alpha s_{i}\left(n_{i \uparrow}-n_{i \downarrow}\right) \\
e^{\alpha s_{i}\left(n_{i \uparrow}+n_{i \downarrow}-1\right)} \stackrel{P H \text { for spin-down }}{\longrightarrow} e^{\alpha s_{i}\left(n_{i \uparrow}-n_{i \downarrow}\right)}
\end{array}\right.
\end{equation}\]
CDW Channel $\alpha$ 是虚的,单看变换前的结果,是看不出是否有复符号问题存在的。而在幺正的Particle-hole变换之后,权重的值是不变的。我们看到对于自旋上和下的各矩阵元素都是互相复共轭的,Particle-hole变换之后权重为正的实数,权重自然为正的实数。